Apply to create account -> mailto:apply [snail] wiki [period] audio
Faltung
Current version of the page has been reviewed and is approved ().
Faltung als Verknüpfung von LTI-Systemen und Signalen
Bei LTI-Systemen werden die Eingangssignale durch Anwendung der Differenzengleichung zum Ausgangssignal. Es gibt aber eine allgemeinere Vorschrift, die direkt mit der Impulsantwort zusammen hängt.
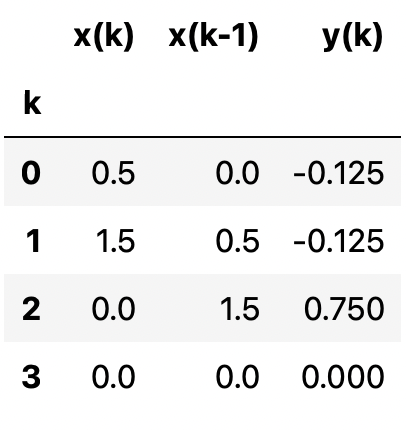
Zur Veranschaulichung wird zunächst ein einfaches Beispiel berechnet. Das Eingangssignal ist durch zwei Werte gegeben, wir nehmen an x(0) = 0,5 und x(1) = 1,5 . Das System ist durch
y(k) = -0,25x(k)+0,5x(k-1)
definiert. Wie lautet die Ausgangsfolge? Man könnte jetzt einfach die verschiedenen Zeitpunkte k annehmen und das Ergebnis direkt hinschreiben. In Tabellenform wäre das Ergebnis:
Für dieses einfache Beispiel ist das noch leicht möglich, bei längeren Folgen wäre diese Lösung unpraktisch. Statt dessen versuchen wir einen allgemeineren Lösungsweg zu finden. Die Eingangsfolge x(k) lässt sich für alle k mit Hilfe der delta-Folge \delta(k) durch
x(k) = 0,5\delta(k)+1,5\delta(k-1)
vollständig beschreiben.
Mit dem Gesetz der Linearität und dem Wissen der Impulsantwort h(k) = [-0,25 \space \space0,5] , ergibt sich die Antwort für y(k) aus der Summe der gewichteten und verschobenen Impulsantworten, da jede der delta-Folgen die Impulsantwort als Systemantwort hervorruft.
Allgemeiner lässt sich sagen, jedes diskrete Eingangssignal lässt sich in viele kleine Einzelimpulse zerlegen. Wir haben es also immer mit einer gewichteten Summe von Delta-Impulsfolgen zu tun. Die Theorie sagt, dass die Impulsantwort ein LTI-System vollständig beschreibt. Außerdem gilt für LTI-Systeme das Superpositionsprinzip. Das Ausgangssignal eines LTI-Systems kann deshalb durch eine mit linearen Koeffizienten gewichtete Addition der zeitlich verschobenen Impulsantwort berechnet werden.
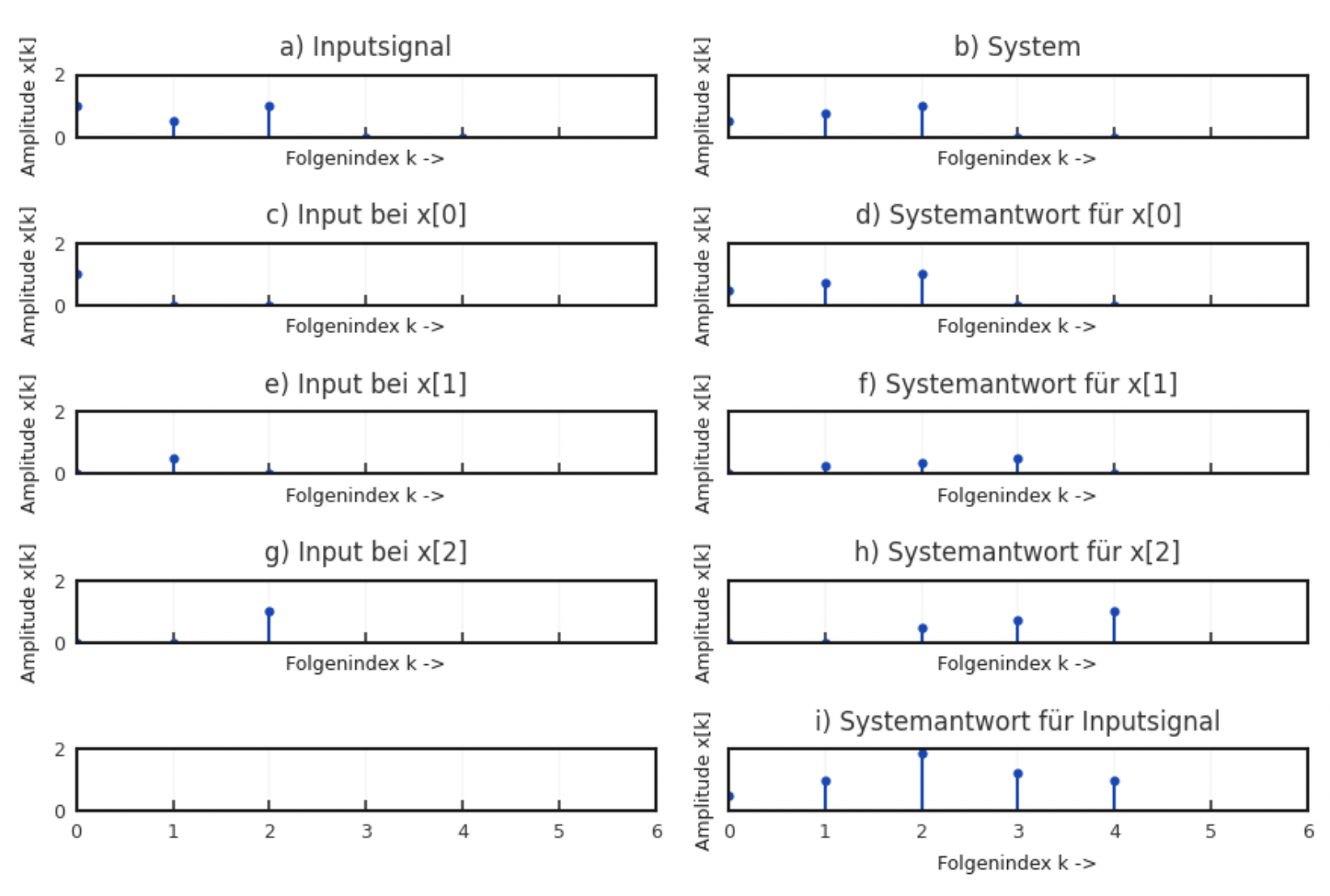
Um dies zu veranschaulichen, ist in Abbildung 3.7 diese Zerlegung für ein Beispiel durchgeführt. Bild a) zeigt die Eingangssfolge x(k) = [1 \space \space 0,5 \space \space 1] , Bild b) das System h = [0,5 \space \space 0,75 \space \space 1] . Zerlegt man nun die Eingangsfolge in drei Einzelimpulse, ergeben sich die drei Bilder c), e), g). Jeder dieser Einzelimpulse erzeugt eine verschobene und gewichtete Version der Impulsantwort (Bilder d), f), h)). Das Ausgangssignal (Bild i)) ergibt sich schlussendlich aus der Summe dieser Ausgangssignale.