Apply to create account -> mailto:apply [snail] wiki [period] audio
Linearität
Current version of the page has been reviewed and is approved ().
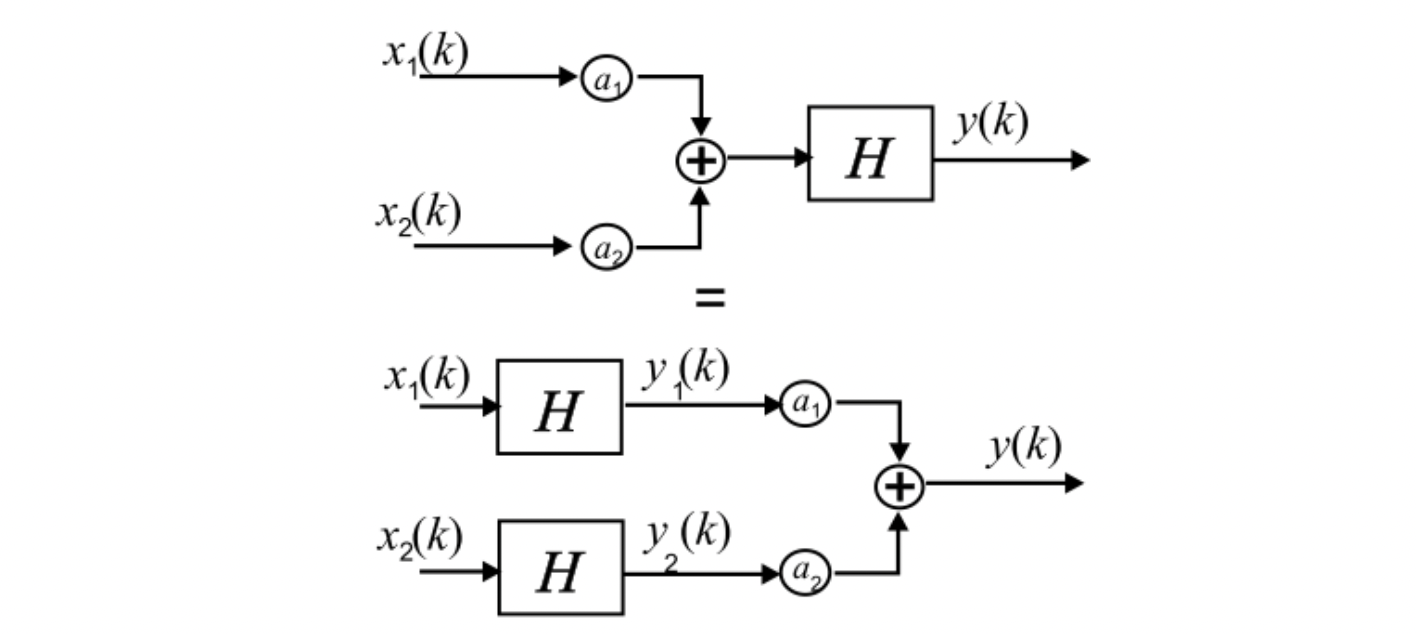
Lineare Systeme zeichnen sich dadurch aus, dass das so genannte Superpositionsprinzip (Überlagerungsprinzip) gilt. Dies bedeutet, dass die additive Überlagerung der gewichteten Eingangssignale und die Verknüpfung mit dem System genau zu dem gleichen Ergebnis führt, wie die gewichtete additive Überlagerung der einzelnen Signale am Ausgang des linearen Systems. Mathematisch ausgedrückt durch
f \{a_1x_1(k) +a_2x_2(k) +...+ a_Nx_N(k)\} = a_1f\{x_1(k)\}+a_2f\{x_2(k)\}+...+a_Nf\{x_N(k)\} ,
wobei f\{.\} die Systemfunktion darstellt, a_i die linearen Gewichte und x_i(k) die Eingangssignale. Abbildung 3.6 verdeutlicht den Zusammenhang. Bei LTI-Systemen kann das System H vor den Summationspunkt und vor den linearen Gewichten a_1 und a_2 verschoben werden.